
Now Reading: ‘The Fantastic Four: First Steps’: Julia Garner dons the Mo-Cap suit in this exclusive bonus clip (video)
-
01
‘The Fantastic Four: First Steps’: Julia Garner dons the Mo-Cap suit in this exclusive bonus clip (video)
‘The Fantastic Four: First Steps’: Julia Garner dons the Mo-Cap suit in this exclusive bonus clip (video)

Marvel’s First Family is zooming into the streaming sphere with the official digital release of “The Fantastic Four: First Steps” on Tuesday (Sept. 23, 2025).
This superhero extravaganza comes home just prior to the blockbuster’s Oct. 14 physical media launch for the Cinematic Universe Edition on 4K UHD + Blu-ray + Digital Code, SteelBook Packaging for 4K UHD + Blu-ray + Digital Code, a Blu-ray Combo Pack via Blu-ray + Digital Code, and good old standard DVD.
To celebrate its first-stage digital debut, we’ve got an exclusive bonus clip showcasing the shining herald of Galactus, the female Silver Surfer named Shalla-Bal, as portrayed by Julia Garner. Check out her intricate motion capture suit, with director Matt Shakman discussing Garner’s on-set bravery and the actress talking about the process.

Conceived by the legendary Stan Lee and ace artist John Buscema in the pages of 1968’s “The Silver Surfer #1,” the character of Shalla-Bal was Zenn-Lavian royalty from the planet Zenn-La. Her boyfriend was the genius scientist Norrin Radd, who was first transformed into the original Sentinel of the Spaceways known as the Silver Surfer.
Special bonus material delivered with this week’s digital offering and later home video physical editions include audio commentaries by Shakman and production designer Kasra Farahani, an amusing gag reel, and a number of deleted scenes: “Thanksgiving Soup Kitchen,” “Fantastic Four Day,” “Subterranea,” “Birthday Sweater” and “Taking Turns.” Featurettes superhero fans can enjoy are “Meet the First Family,” “Fantastic Futurism,” and “From Beyond and Below.”
Marvel Studios’ “The Fantastic Four: First Steps” lands on all digital platforms on Sept. 23 and home video on Oct 14.







Related Posts

Stay Informed With the Latest & Most Important News
Previous Post
Next Post



Advertisement
-
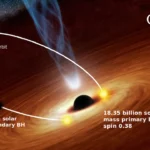 01Two Black Holes Observed Circling Each Other for the First Time
01Two Black Holes Observed Circling Each Other for the First Time -
 02From Polymerization-Enabled Folding and Assembly to Chemical Evolution: Key Processes for Emergence of Functional Polymers in the Origin of Life
02From Polymerization-Enabled Folding and Assembly to Chemical Evolution: Key Processes for Emergence of Functional Polymers in the Origin of Life -
 03Astronomy 101: From the Sun and Moon to Wormholes and Warp Drive, Key Theories, Discoveries, and Facts about the Universe (The Adams 101 Series)
03Astronomy 101: From the Sun and Moon to Wormholes and Warp Drive, Key Theories, Discoveries, and Facts about the Universe (The Adams 101 Series) -
 04True Anomaly hires former York Space executive as chief operating officer
04True Anomaly hires former York Space executive as chief operating officer -
 05Φsat-2 begins science phase for AI Earth images
05Φsat-2 begins science phase for AI Earth images -
 06Hurricane forecasters are losing 3 key satellites ahead of peak storm season − a meteorologist explains why it matters
06Hurricane forecasters are losing 3 key satellites ahead of peak storm season − a meteorologist explains why it matters -
 07Binary star systems are complex astronomical objects − a new AI approach could pin down their properties quickly
07Binary star systems are complex astronomical objects − a new AI approach could pin down their properties quickly