
Now Reading: Chinese startup tests flexible robotic arm in space for on-orbit servicing
-
01
Chinese startup tests flexible robotic arm in space for on-orbit servicing


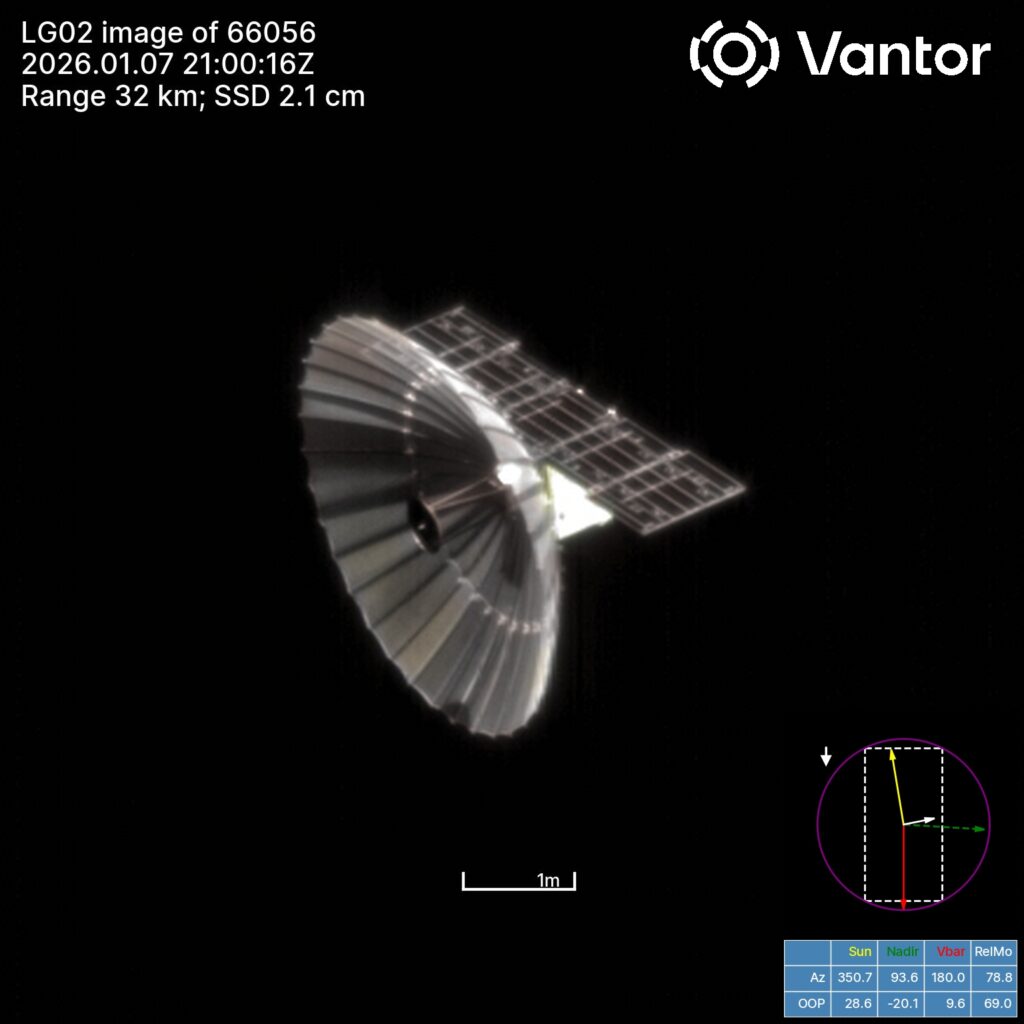
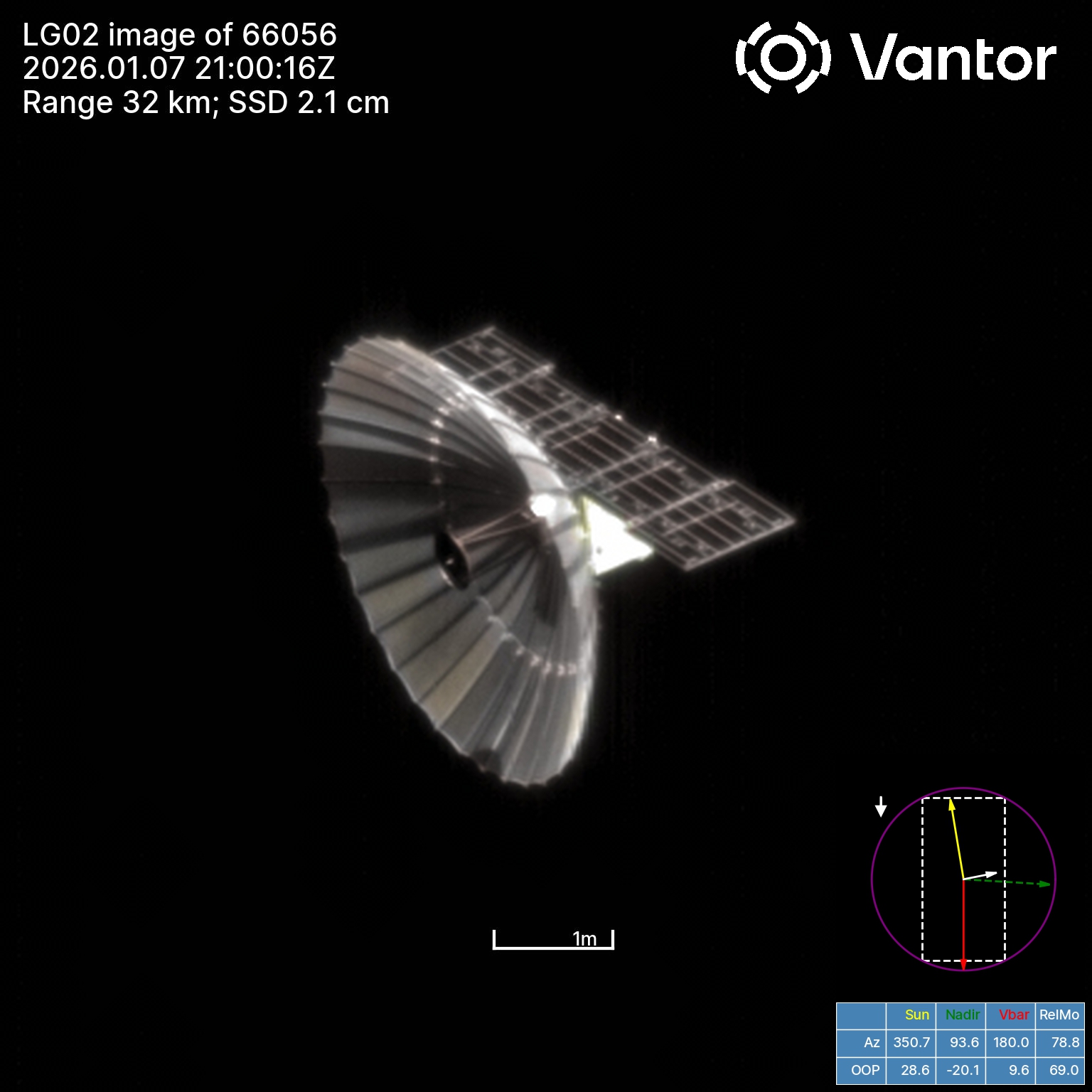
HELSINKI — A Chinese commercial company has conducted an on-orbit demonstration of a flexible robotic arm, marking progress toward capabilities for satellite servicing, refueling and debris removal.
Sustain Space’s Xiyuan-0 satellite, also known as Yuxing-3 (06), launched on a Kuaizhou-11 rocket March 16 (UTC). The satellite features a flexible robotic arm with the aim of testing simulated refueling operations, force-compliant manipulation and precision control.
All on-orbit operations of the flexible robotic arm have now been successfully completed, according to a March 25 statement from Sustain Space, marking what the company describes as a step forward for China’s commercial space industry in the field of on-orbit space services.
Sustain Space said it successfully verified four modes of operation during the technology demonstration. These are a pre-programmed autonomous refueling simulation, human teleoperation, vision-based servo operations, and force-controlled drawing tests.
The tests mark apparent progress towards on-orbit servicing capabilities such as satellite life extension, in-space assembly and debris mitigation. While stating its vision to develop capabilities, the company has not yet outlined detailed plans or timelines for next missions and the transition from demonstrations to operations. The reported refueling activities were simulations, with no actual propellant transfer confirmed.
“This is quite a technological accomplishment. I’m even more impressed with the level of detail in the company statement,” Victoria Samson, chief director of space security and stability at the Secure World Foundation, told SpaceNews. “Information is a key part of transparency and as new activities are undertaken in space, it would be good to establish a precedence of sharing details as much as feasible to allay concerns about these programs’ ultimate purposes or missions.”
Development of the satellite involved a number of partners, demonstrating industrial-academic cooperation to produce an innovative, small-scale mission. Shenzhen Mofang Satellite Technology Co., Ltd. provided the satellite platform, while Tsinghua University Shenzhen International Graduate School was a co-developer of the robotic arm. Hunan University of Science and Technology provided the optical payload for vision-based control and teleoperation feedback, with Emposat supporting communications and operations.
In addition to the robotic arm tests, the Xiyuan-0 satellite will conduct an accelerated deorbit experiment using a deployable drag-augmentation sphere, demonstrating a potential method for reducing orbital lifetime and mitigating space debris.
Sustain Space, or Sanyuan Aerospace, was founded in June 2022 and is a subsidiary of Emposat. Sustain Space secured early funding rounds in 2024. Emposat is a commercial satellite ground station and operations service provider with ground stations in China and other countries.
The pair say they will further explore a “closed-loop” commercial operation model, leveraging Emposat’s ground infrastructure to support integrated on-orbit servicing capabilities, including low-latency, human-in-the-loop operations.
Sustain Space says the test is a significant boost for China’s commercial aerospace industry in supporting the sustainable development of future space through on-orbit operation and services, stating the belief that humanity is heading into a new era of large-scale space infrastructure construction.
China has a strong interest in on-orbit servicing. The country’s Shijian-21 and Shijian-25 spacecraft appear to have completed pioneering on-orbit refueling tests in geostationary orbit in 2025. NASA cancelled its On-orbit Servicing, Assembly, and Manufacturing 1 (OSAM-1) project in 2024 following delays and cost overruns, though the agency says it backs overall work on in-space servicing, assembly and manufacturing technologies.
Companies in the United States, Europe and Japan, including Astroscale and Northrop Grumman, are pursuing similar on-orbit servicing capabilities using different technical approaches.







Related Posts


Stay Informed With the Latest & Most Important News
Previous Post
Next Post
Previous Post
Next Post


Advertisement
-
 01Two Black Holes Observed Circling Each Other for the First Time
01Two Black Holes Observed Circling Each Other for the First Time -
 02From Polymerization-Enabled Folding and Assembly to Chemical Evolution: Key Processes for Emergence of Functional Polymers in the Origin of Life
02From Polymerization-Enabled Folding and Assembly to Chemical Evolution: Key Processes for Emergence of Functional Polymers in the Origin of Life -
 03Astronomy 101: From the Sun and Moon to Wormholes and Warp Drive, Key Theories, Discoveries, and Facts about the Universe (The Adams 101 Series)
03Astronomy 101: From the Sun and Moon to Wormholes and Warp Drive, Key Theories, Discoveries, and Facts about the Universe (The Adams 101 Series) -
 04True Anomaly hires former York Space executive as chief operating officer
04True Anomaly hires former York Space executive as chief operating officer -
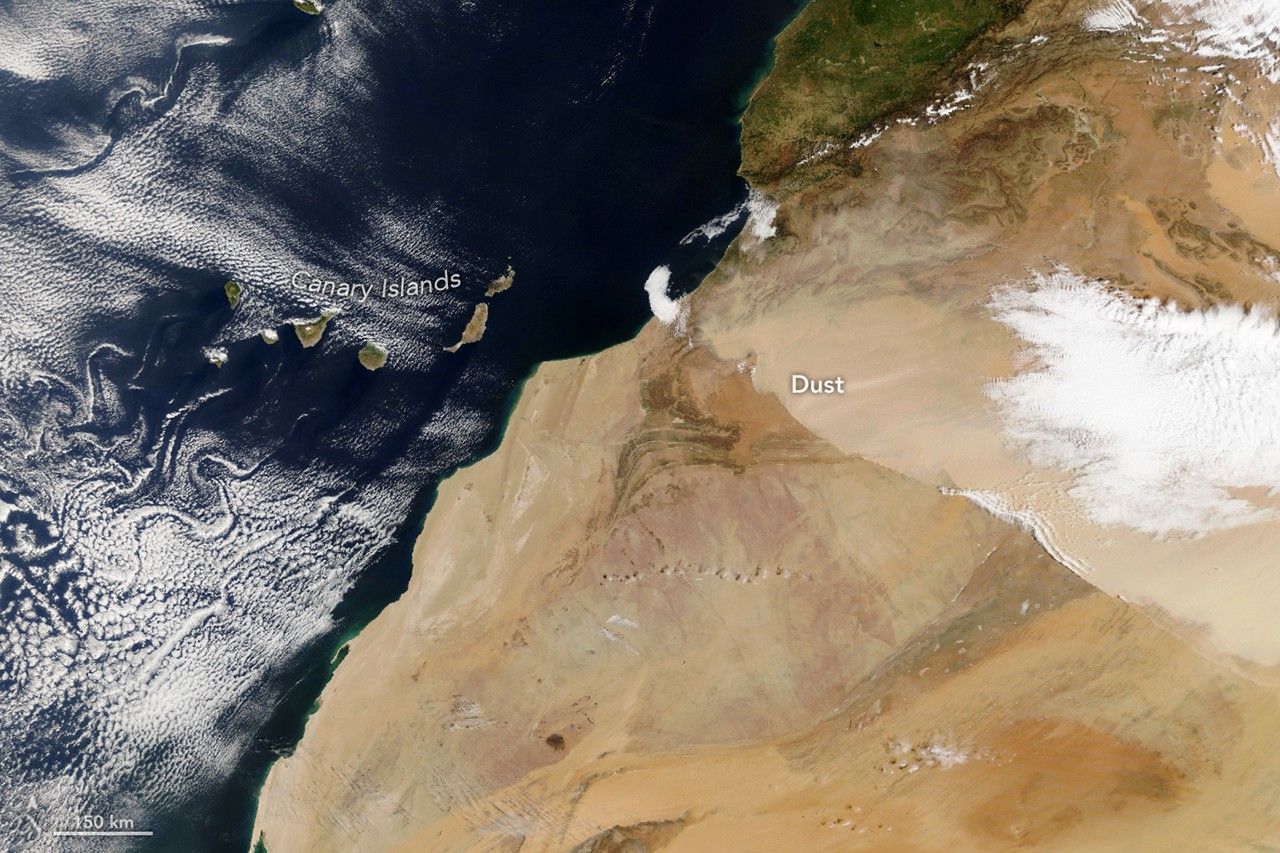
 05Φsat-2 begins science phase for AI Earth images
05Φsat-2 begins science phase for AI Earth images -
 06Hurricane forecasters are losing 3 key satellites ahead of peak storm season − a meteorologist explains why it matters
06Hurricane forecasters are losing 3 key satellites ahead of peak storm season − a meteorologist explains why it matters -
 07Binary star systems are complex astronomical objects − a new AI approach could pin down their properties quickly
07Binary star systems are complex astronomical objects − a new AI approach could pin down their properties quickly