
Now Reading: Ocean Planet Exploration: Recovery Of NIPR AUV MONACA
-
01
Ocean Planet Exploration: Recovery Of NIPR AUV MONACA
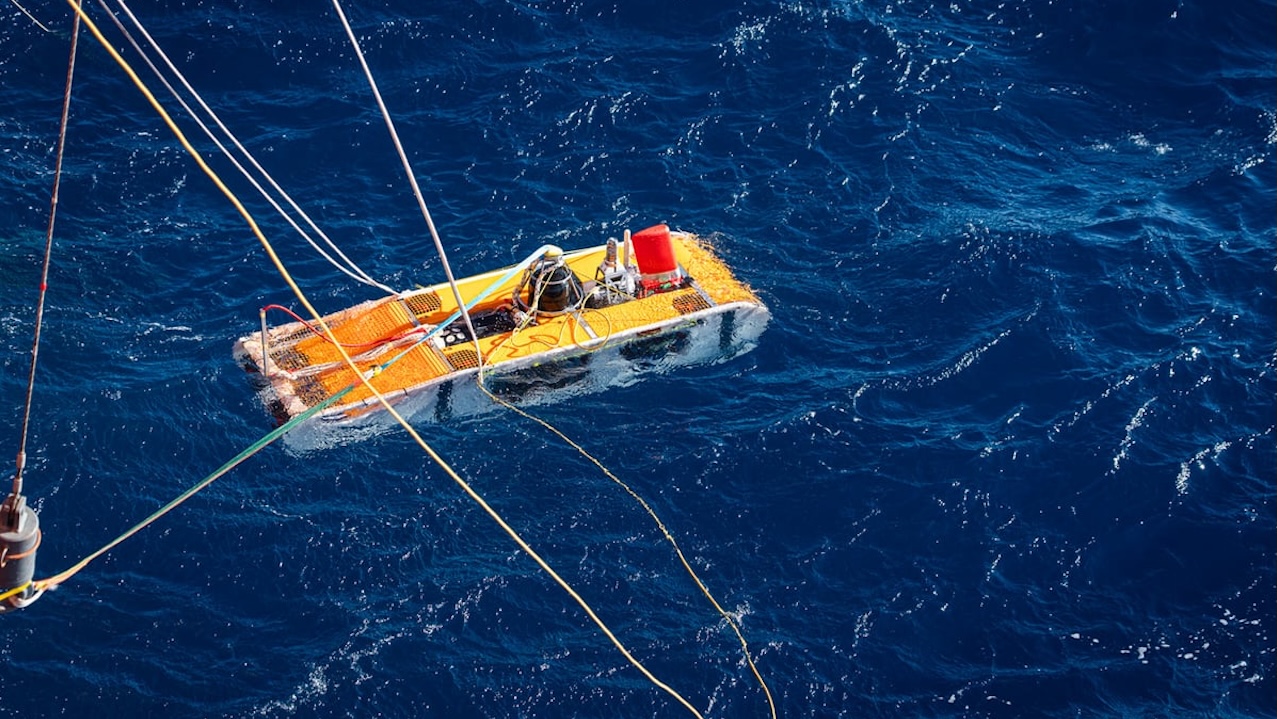

The buoyancy adjustment made on the first day of Totten Glacier operations Photo: JARE67 Miho Ikeda (March 6, 2026)
Editor’s note: When we start to mount Astrobiology missions to explore ocean worlds we’ll need ways for our robotic submersibles to observe and interact with whatever life forms they may encounter. We’re going to our droids to be as smart and self-reliant as possible. How we study our own living water world is the perfect place to plan for future, offworld missions when it comes to detecting and characterizing life on the planet below. Of special importance to astrobiology expeditions are the plans being formulated for the exploration of icy ocean worlds in our own star system such as Enceladus, Europa, Ganymede and beyond – and the necessary role that autonomous submersibles will play.
Editor’s note: this was translated from Japanese to English via AI. Original posting
On March 15th, a navigation test of the autonomous underwater robot “MONACA” was conducted. In the 67th action, after the first uncensored navigation, it was not confirmed that it surfaced and it was temporarily missing, but it was able to be recovered on March 21st, six days after the introduction. This blog is a record from the day it went missing from the day it was searched and recovered.
On March 15th, the navigation test of AUV “MONACA”, an observation that started from Leg2 in the 67th action, was conducted.

The “MONACA” specification. The sensor unit can be turned upside down and turned so that it can measure ice and the seabed, and in addition, it is equipped with observational instruments such as CTD that obtains basic data such as salt and temperature of seawater. Source: Web pole underwater robot “MONACA” dives in the Antarctic Ocean (Editor’s note image translation by Astrobiology.com via Google Translate).
MONACA is an underwater robot jointly developed by the University of Tokyo and the National Institute of Polar Research. Unlike (Remotely Operated Vehicle) ROV1, which requires cables and controls by humans, it is possible to travel long distances without being restricted by cable length, and is classified as (Autonomous Underwater Vehicle) AUV 2, which acts by making its own judgment based on the surrounding environment without relying on remote control. Among them, “MONACA” is Japan’s first Antarctic AUV (hereinafter referred to as MONACA) developed to freely explore Antarctic sea icing and ice shelf ice ranges that cannot be approached by ships. Development began in 2017, and so far we have achieved two seasons of sailing in the Antarctic Ocean.
In the first round, the operation from “Shirase” was carried out, and it was the first in Japan to realize autonomous navigation in the Antarctic Ocean. In the 66th round last year, the cable was removed and the operation was successful in unscrewed operation in Lutso Holm Bay and off the Totten Glacier. This year, the goal was to extend the sailing distance further and achieve a total of 2km of unaccompanied operation.

MONACA being put into the sea ice Photo: JARE67 Miho Ikeda (March 15, 2026)
In the morning, we completed the operation confirmation with a cable, and in the afternoon, the navigation test without permission began. With the cooperation of the experienced Shirase crew with the know-how of MONACA observation, the lifting work progressed surprisingly smoothly, and the cable was removed around 12:50, and autonomous navigation began.
The mission on this day is to make two round trips (500m x 4) with a distance of 500 m while changing the depth. Once the voyage starts, you can only do so on the ship, but you will monitor the movement based on the location information obtained from the sound device (SSBL) suspended on the starboard side.
Around 13:20, it was confirmed that MONACA had entered the final return trip, even though it was slightly swept away due to the influence of the current, and the only thing left was to wait for it to surface.
However, even though the acoustic device’s response has already surfaced and there are good values, it is impossible to confirm the appearance no matter how long you wait. In fact, due to the wind and currents that exceeded our expectations, the sea ice group, which was far enough at the start, and MONACA approached. It was revealed that MONACA was likely to have surfaced under the ice sheet.

Members and crew gathered on the deck to search for MONACA. Photo: JARE67 Miho Ikeda (March 15, 2026)
The two members of the MONACA team decided to send instructions from the acoustic equipment to MONACA “re-submarine after re-submarine, moving and re-floating” even when the scene was in a riot for a while. After several attempts, MONACA received an order and resumed navigation. However, it was not possible to see the aircraft and it was a frustrating time, and it was found that MONACA was caught in the sea ice even if it resurfaced from the acoustic reaction obtained again.
The remaining battery capacity of MONACA itself is about one or two hours at that time. Soon after despair, they immediately move the ship with the cooperation of the “Shirase” side, break the ice around the expected landing position, and try to rescue or re-contact with acoustic equipment.
After that, although there were two reactions from MONACA, it was not possible to identify the position with a response such as a weak response that does not contain information about the depth of the water or direction. The search for the day continued until 7pm, but we were unable to find MONACA.
A full-scale search.
The second day, the battery is thought to have already run out. The remaining means is to wait for the visual search and the reaction of the iridium beacon that operates with a different power supply from the main body. The latter is a mechanism to transmit the GPS position when MONACA surfaced on the sea surface, but since there was no reaction so far, it was judged that it is still under the ice sheet, so a full-scale search around the expected surface position began.
The search was carried out over a total of about 14 hours for three days.
The last day of the search was March 19th. On this day, the search for MONACA was completed. Thank you.” Along with the announcement from the bridge, the MONACA search was temporarily terminated.
The GPS has arrived!

Can you see the small antenna? Photo: JARE67 Miho Ikeda (March 21, 2026)
At midnight on March 20th, things are moving. I got the GPS location information from MONACA. The first person I noticed was Mr. Shimono, a MONACA team co-pilot. The arrival of the GPS means that MONACA has climbed to the surface of the sea after passing through an obstacle that seems to be an ice sheet. The next morning, the observation team and the “Shirase” side were coordinated, and it was decided to take the course for the rescue of MONACA.
In addition to MONACA team leader Yamagata, members with binoculars and crew members with binoculars gathered at Kanbashi on March 21st.
And around 8:20am, about 800m to the expected position to rise, “There was!” And his voice went up. A small red antenna that you will lose if you blink. It is undeniably MONACA.

MONACA recovery
The work began immediately with the know-how cultivated in the collection operation of the moored system and the undersea pressure gauge, and we were able to collect MONACA without injury.
The work began immediately with the know-how cultivated in the collection operation of the moored system and the undersea pressure gauge, and we were able to collect MONACA without injury.
Astrobiology, Oceanography,







Related Posts
Stay Informed With the Latest & Most Important News
Previous Post
Next Post




Advertisement
-
 01Two Black Holes Observed Circling Each Other for the First Time
01Two Black Holes Observed Circling Each Other for the First Time -
 02From Polymerization-Enabled Folding and Assembly to Chemical Evolution: Key Processes for Emergence of Functional Polymers in the Origin of Life
02From Polymerization-Enabled Folding and Assembly to Chemical Evolution: Key Processes for Emergence of Functional Polymers in the Origin of Life -
 03Astronomy 101: From the Sun and Moon to Wormholes and Warp Drive, Key Theories, Discoveries, and Facts about the Universe (The Adams 101 Series)
03Astronomy 101: From the Sun and Moon to Wormholes and Warp Drive, Key Theories, Discoveries, and Facts about the Universe (The Adams 101 Series) -
 04True Anomaly hires former York Space executive as chief operating officer
04True Anomaly hires former York Space executive as chief operating officer -
 05Φsat-2 begins science phase for AI Earth images
05Φsat-2 begins science phase for AI Earth images -
 06Hurricane forecasters are losing 3 key satellites ahead of peak storm season − a meteorologist explains why it matters
06Hurricane forecasters are losing 3 key satellites ahead of peak storm season − a meteorologist explains why it matters -
 07Binary star systems are complex astronomical objects − a new AI approach could pin down their properties quickly
07Binary star systems are complex astronomical objects − a new AI approach could pin down their properties quickly